[ Home | Syllabus | Course Notes | Assignments | Search]
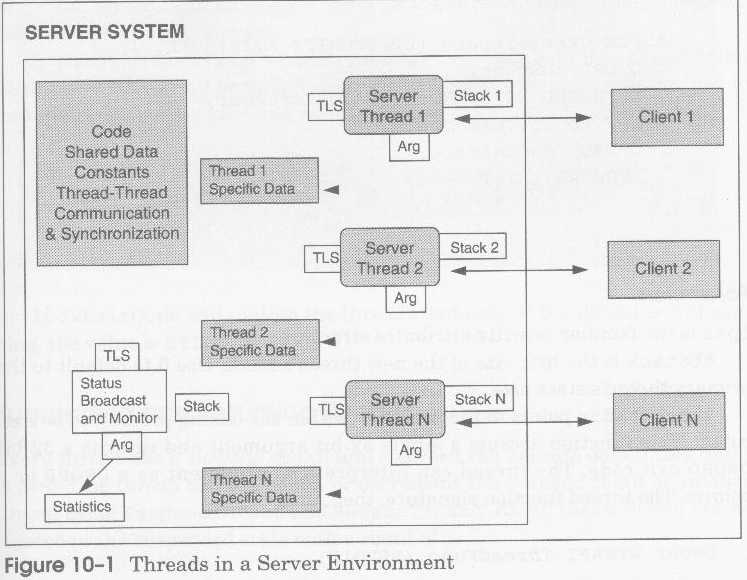
Multiple Clients = multiple threads OR multiple Transactions
Thread runs a special function with one parameter.
This parameter can be a pointer to any arbitrary data structure.
WIN32 supports a general WaitFor mechanism which works for many different kinds of events.
Thread safe functions
PROBLEM: writing functions which can be simultaneously used
by multiple threads. The difficulty is the use of global variables. Simultaneous access to
the same global variable can cause failures.
Also call by reference with shared objects.
Many systems libraries were designed in a single thread environment. Need to use thread-safe versions. OR use thread synchronization.
Related to re-entrant code.
Consider the following example for incrementing a global variable "x" in a function called by multiple threads more or less simultaneously.
x++;
Even this simple statement is NOT atomic in most implementations - on many machines, the compiler will generate code something like this:
LOADREGISTER X,A // load register A with value stored in memory labeled X ADD =1,A // Add literal 1 to value in register A STOREREGISTER A,X // Store value in register A to memory location X
If one thread executing this c++ instruction is interrupted after the Load but before the store and another thread calls the same function, the value of X will be wrong (e.g. say "X" is initially 3, first thread stores "3" in register A but is interrupted before storing it back in "X", second thread finds the value of 3 in memory location "X", increments and stores "4" in "X", then first thread resumes and stores "4" in "X" also, the value of "X" is off by one.
Let's run some experiments to show the problem. The design of revealing experiments is critical in gaining an understanding of large complex systems.
(Source Code is here)
// ... #include <windows.h> // for defining HANDLE, Sleepconst int SLEEP_TIME = 1000; int global1; // file global
What will the output?
void testThread(DWORD myId);
void main()
{
HANDLE testHandles[2];
testHandles[0]
// Separate file
//**** all threads started with this code will share the file global variable "global2"
// demonstrates that two instances of testThread both access the same variable
// and thus can potentially interfere with each other/ (Race condition - one of the
// complexities of writing distributed systems code)
int global2 = 12345;
void testThread(DWORD myId)
{
int id = myId;
cout << "Started Thread ID: " << id << endl;
cout << "BEFORE: Global2 is: " << global2 << endl;
global2 = id;
Sleep(id*SLEEP_TIME); // give other thread chance
cout << "AFTER: Global2 is: " << global2 << endl;
}
// What will be the output? // does it matter if the two threads sleep differently?
(Source Code is here)
DWORD tlsIndex;
void testThread(int* myId);
void main()
{
// . . .
tlsIndex = TlsAlloc();
//tls gives each thread a private global variable
testHandles[0] = CreateThread(0,0,
(LPTHREAD_START_ROUTINE) testThread,
&id, 0, &threadId);
Sleep(SLEEP_TIME); // give first thread a chance to save its parameter
//. . . separate file for thread code
extern DWORD tlsIndex;
// What output? // does the timing matter?