  | 1 of 32


 |   |
| | 1 of 32
| |
The std library does not contain a graph ADT as such,
The Boost library collection is a respected source of C++ libraries. In fact, it has served as a proving ground for a lot of ADTs that eventually made their way into std as the C++ language advanced to C++11, C++14, C++17, and C++20.
We are going to use the Boost Graph library because
std library components.The Boost Graph library supports both of the main data structures we have considered: the adjacency matrix and adjacency lists.
The actual graph types are named for their underlying implementation. For example, a digraph implemented using adjacency lists is
#include <boost/graph/adjacency_list.hpp>
⋮
using namespace boost;
⋮
typedef adjacency_list<listS, vecS, bidirectionalS> Graph;
Graph g;
The template parameters to adjacency lists are
The data structure used to store edges for each vertex. listS indicates that a standard list will be used. As you might suspect, this allows for easy and fast addition and removal of edges.
The data structure used to denote the vertices. vecS indicates that a vector will be used.
bidirectionalS is a tag indicating that this will be a digraph, but that we we will be able to iterate over incoming edges to a vertex as well as iterate over outgoing edges.
If we don’t need easy access to incoming edges, then directionalS saves time and memory by omitting the extra storage of incoming edges.
If we want an undirected graph instead of a digraph, use undirectedS.
typedef boost::graph_traits<Graph> GraphTraits;
typedef GraphTraits::vertex_descriptor Vertex;
You can add vertices to a graph with add_vertex
Vertex v = add_vertex(g);
You can also create a graph holding a fixed number of vertices:
Graph g(6); // create a graph with 6 vertices
You can iterate over all of the vertices in a graph by using vertices(g) to get a pair of iterators denoting a starting and stopping position:
auto vertexRange = vertices(g);
for (auto v = vertexRange.first; v != vertexRange.second; ++v)
doSomethingWithVertex(*v);
You can find out how many vertices are in a graph with num_vertices(g):
unsigned nV = num_vertices(g);
After vertices, the next obvious step is to look at edges.
typedef GraphTraits::edge_descriptor Edge;
Adding edges to a graph is easy:
Edge e = add_edge (v1, v2, g).first;
You can recover the source and destination vertices of an edge
Vertex src = source(e, g);
Vertex dest = target(*e, g);
And, after having added several edges, you can iterate over all of the edges in the graph:
auto edgeRange = edges(g);
for (auto e = edgeRange.first; e != edgeRange.second; ++e)
{
doSomethingWith(*e);
}
You can find out how many edges are in a graph with num_edges(g):
unsigned nE = num_edges(g);
Once you have added a number of vertices and edges to a graph, you can explore the adjacency relationships by requesting ranges of iterators for vertices/edges related to a given vertex.
For example, given a vertex v0, you can explore all vertices adjacent to it:
auto vertexRange = adjacent_vertices(v0, g);
for (auto w = vertexRange.first; w != vertexRange.second; ++w)
doSomethingWithVertex(*w);
The number of edges emerging from a vertex is called the out-degree of that vertex, and can be found like this:
unsigned numOut = out_degree(v0, g);
You can access those outgoing edges by requesting a pair of iterators:
auto edgeRange = out_edges(v0, g);
for (auto e = edgeRange.first; e != edgeRange.second; ++e)
doSomethingWithEdge(*e);
The number of edges pointing to a vertex is called the in-degree of that vertex, and, for bidirectional graphs, can be found like this:
unsigned numOut = in_degree(v0, g);
You can access those incoming edges, for bidirectional graphs, by requesting a pair of iterators:
auto edgeRange = in_edges(v0, g);
for (auto e = edgeRange.first; e != edgeRange.second; ++e)
doSomethingWithEdge(*e);
You can check to see if a specific edge exists between two vertices v and w in the graph g with the edge function:
auto checkEdge = edge(v, w, g);
if (checkEdge.second)
{
// the edge exists
Edge e = checkEdge.first;
⋮
}
To actually use graphs in practical problems, we usually wind up associating data values of some kind to either the vertices, the edges, or both.
We can draw a distinction here between permanent data that becomes part of the graph for as long as that graph exists, and temporary data that is set up by some algorithm and that disappears when that algorithm is completed.
The Boost Graph Library supports permanent data by a process that it calls “bundling”. Two parameters in the declaration of adjacency_list allow us to attach data types to vertices and edges.
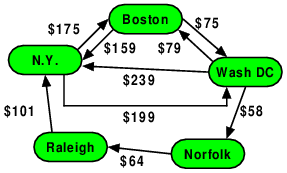
For example, suppose that we wanted to construct this graph denoting an airline’s pricing for flying from one city to another.
We can do this by creating new classes or structs holding the data we want.
struct Flight { // data for edges
int price; // in dollars
};
struct Airport { // data for vertices
string city;
};
Then we add those classes to the declaration of our graph type
typedef boost::adjacency_list<boost::listS, // store edges in lists
boost::vecS, // store vertices in a vector
boost::bidirectionalS, // a directed graph
Airport, // vertex data
Flight // edge data
>
AirlineGraph;
AirlineGraph ag(5);
Now, whenever we have a vertex, v, we can access its data like this:
cout << "We are in " << ag[v].city << endl;
and whenever we have an edge, e, we can access its data similarly:
ag[e].price = ag[e].price + 50; // price hike
To fill out the example, here is rest of the code to build that graph:
enum Cities {Boston, NY, WashDC, Norfolk, Raleigh, endofCities};
std::array<string,5> cityNames {"Boston", "NY", "WashDC",
"Norfolk", "Raleigh"};
typedef pair<Cities, Cities> cpair;
pair<Cities, Cities> flights[] {
cpair(NY, Boston), cpair(NY, WashDC),
cpair(Boston, NY), cpair(Boston, WashDC),
cpair(WashDC, Boston), cpair(WashDC, NY), cpair(WashDC, Norfolk),
cpair(Norfolk, Raleigh),
cpair(Raleigh, NY)
};
int prices[] {
175, 199,
159, 75,
79, 239, 58,
64,
101,
-1 // stop value
};
AirlineGraph ag(5);
for (Cities i = Boston; i != endofCities; i = Cities(i+1))
{
ag[(Vertex)i].city = cityNames[i];
}
for (int i = 0; prices[i] >= 0; ++i)
{
auto e = add_edge ((Vertex)flights[i].first,
(Vertex)flights[i].second,
ag).first;
ag[e].price = prices[i];
}
If we want to associate data temporarily with either vertices or edges, we need to set up something like a map that would let us retrieve and store data values by vertex or edge.
The usual method for doing this would be to use an unordered_map. The Boost library provides hash functions for both vertices and edges, so we can define maps with those as keys, e.g.:
std::unordered_map<Vertex, bool, boost::hash<Vertex> > processed;
std::unordered_map<Edge, double, boost::hash<Edge> > distances;
Another option is open because we have chosen, in these examples, to have the Boost graph store the vertices in a vector. Our Vertex type is actually an integer, and we can use that with ordinary arrays or vectors.
For example, suppose that we wanted to temporarily label each vertex in a graph g with a boolean indicating whether it had been processed or not, initially set to false.
auto allVertices = vertices(g); // a pair of iterators
int nVertices = num_vertices(g);
vector<bool> processed (nVertices, false);
⋮
if (!processed[v])
{
doSomethingToVertex(v);
processed[v] = true;
}
⋮
Many problems require us to visit all the vertices of a graph.
vertices(g) iterators.Very often, however, we want to visit all of the vertices that can be reached from some starting vertex.
Both of these traversals will, in effect, discover a “tree” embedded in the graph.
A spanning tree for a connected graph $G=(V,E)$ is a graph $G’=(V,E’)$ such that $E’ \subseteq E$ and $G’$ is a tree. The spanning tree is a tree that is “embedded” in the graph.
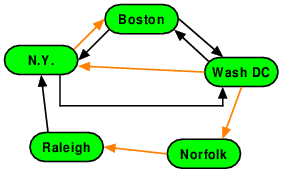
Question:
Is the set of vertices and orange edges shown here a spanning tree for the entire graph? If so, what is its root?
No.
Yes. The root is Boston
Yes. The root is N.Y.
Yes. The root is Norfolk
Yes. The root is Raleigh
Yes. The root is Wash DC
Yes, this is a spanning tree. The root is Wash DC
If we choose Wash. DC as the root, then the nodes and edges do form a tree.
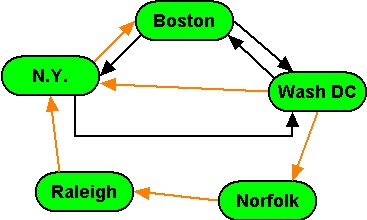
Question:
Is the set of vertices and orange edges shown here a spanning tree for the entire graph? If so, what is its root?
No.
Yes. The root is Boston
Yes. The root is N.Y.
Yes. The root is Norfolk
Yes. The root is Raleigh
Yes. The root is Wash DC
No, this is not a spanning tree.
This collection of highlighted edges cannot form a tree, because N.Y. has two “parents”.
Consider the problem of searching a general tree for a given node.
In a depth-first traversal, we investigate one child’s descendants before exploring its right siblings.
In a breadth-first traversal, we explore all nodes at the same depth before moving on to any deeper nodes.
Most of the tree traversals that we looked at (prefix, postfix, and infix) were all variations of the depth-first idea.
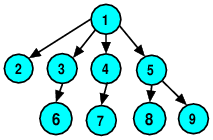
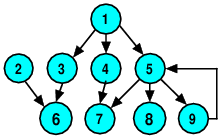
Question: In what order would a depth-first tree traversal, starting from node 1, visit these nodes? (Assume that children of the same node are processed in increasing numeric order.)
1 2 3 4 5 6 7 8 9
1 2 3 6 4 7 5 8 9
2 3 6 1 4 7 8 5 9
None of the above.
The nodes would be visited in the order: 1 2 3 6 4 7 5 8 9
The prototypical code for depth first tree traversal is
void depthFirst (TreeNode* t)
{
if (t != 0)
for (int i = 0; i < t->numChildren; ++i)
depthFirst (t->child[i]);
}
We convert this into a preorder or postorder process depending upon whether we process a node before or after visiting its children.
Now, if we apply this same idea to a graph instead of a tree, starting with vertex 1:
void depthFirst (Graph& dg, Vertex v)
{
auto edgeRange = out_edges(v, dg);
for (auto e = edgeRange.first;
e != edgeRange.second; ++e)
{
Vertex w = target(*e, dg);
depthFirst (dg, w);
}
}
we can see some problems:
Vertex 7 will be visited once as a “child” of 4, and visited again when we reach vertex 5.
Worst of all, we will eventually go from 5 to 9, from 9 back to 5, then to 9 again, and so on, recursing forever (or until we run out of memory for the activation stack).
We can adapt the tree algorithm for use in graphs by using some sort of data structure to keep track of which nodes have already been visited:
void depthFirst (Graph& dg, Vertex v, set<Vertex>& visited)
{
visited.insert (v);
auto edgeRange = out_edges(v, g);
for (auto e = edgeRange.first;
e != edgeRange.second; ++e)
{
Vertex w = target(*e, dg);
if (visited.count(w) == 0)
depthFirst (dg, w, visited);
}
}
The visited set records the vertices that we have already seen. When we are examining adjacent vertices to recursively visit, we simply pass over any that we have already visited.
Breadth-first visits each node at the same depth (distance from the starting node) before moving on to more distant nodes.
In trees, this is also called “Level-Order” traversal.
Question: In what order would a breadth-first tree traversal, starting from node 1, visit these nodes?
1 2 3 4 5 6 7 8 9
1 2 3 6 4 7 5 8 9
2 3 6 1 4 7 8 5 9
None of the above.
The nodes would be visited in the order: 1 2 3 4 5 6 7 8 9
The prototypical code for breadth first tree traversal is
void breadthFirst (TreeNode* root)
{
queue<TreeNode*, list<TreeNode*> > q;
q.push (root);
while (!q.empty())
{
v = q.front ();
q.pop ();
for (int i = 0; i < v->numChildren(); ++i)
{
TreeNode* w = v->child[i];
if (w != 0)
q.push (w);
}
}
}
We use a queue to receive the list of vertices to be visited, starting with the root, then the root’s children, then the root’s grandchildren, and so on.
Again, that tree code would have problems (including going into an infinite loop) if applied to more general graphs.
But we can use the same idea of a set of already-visited vertices to adapt this idea to traversing graphs.
Try out the breadth-first search in an animation.
To implement our Boost-based traversal, we will again choose to use an array to track which vertices have been visited.
template <typename Action>
void breadthFirstTraversal (const Graph& g,
const Vertex& start,
Action doSomethingWith)
{
using namespace std;
queue<Vertex, list<Vertex> > q;
auto allVertices = vertices(g); ➀
unsigned n = num_vertices(g);
bool* visited = new bool[n];
fill_n (visited, n, false);
q.push (start); ➁
visited[start] = true;
while (!q.empty())
{
Vertex v = q.front(); ➂
q.pop();
doSomethingWith(v);
auto outgoing = out_edges(v,g); ➃
for (auto e = outgoing.first; e != outgoing.second; ++e)
{
Vertex w = target(*e, g);
if (!visited[w])
{
q.push (w);
visited[w] = true;
}
}
}
delete [] visited; ➄
}
Almost every graph algorithm is based upon either depth-first or breadth-first search.
Depth-first may be slightly easier to program, as it does not require an additional ADT (the queue).
Breadth-first (or depth-first using an explicit stack) is slightly faster.
The appropriate choice often depends upon the nature of the search and what you are trying to accomplish with your particular algorithm.
| | 1 of 32
| |